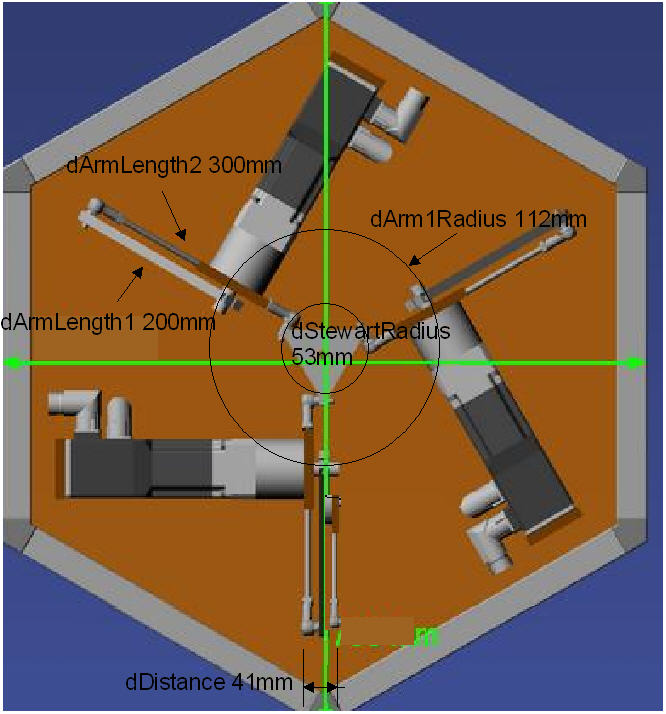
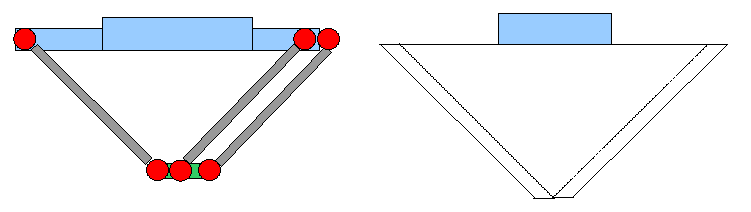
Bipods或者tripods 可以在不同版本下实现:无论是直线导轨的竖直移动 (左侧图像) 或者固定于圆盘的机械臂(右图),配置都是针对 bi/tripod 臂进行的。
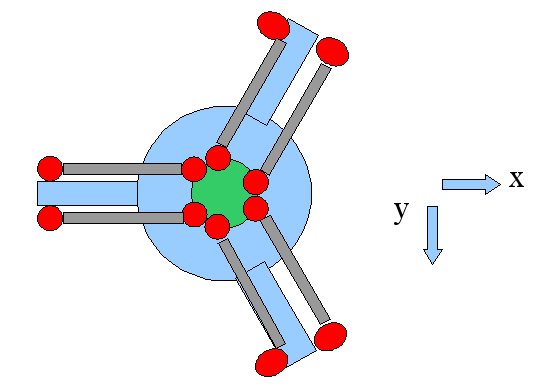
在这种中情况下,位置 x=y=z=0 的情况下,三个机械臂都为水平状态:
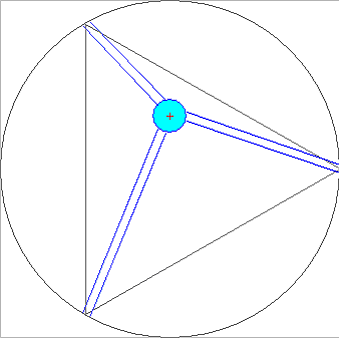
下面视图显示从下网上看标准零位的配置:
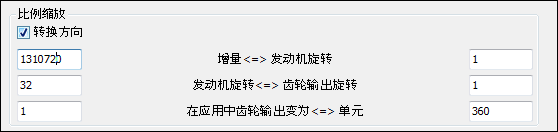
相关的处理模块:
Bipods或者tripods 可以在不同版本下实现:无论是直线导轨的竖直移动 (左侧图像) 或者固定于圆盘的机械臂(右图),配置都是针对 bi/tripod 臂进行的。
在这种中情况下,位置 x=y=z=0 的情况下,三个机械臂都为水平状态:
下面视图显示从下网上看标准零位的配置:
相关的处理模块: