对于关节6自由度机器人有6个旋转轴和6个自由度 (DoF)。机械手的手腕处三个轴交汇于一点,手腕的中心点。
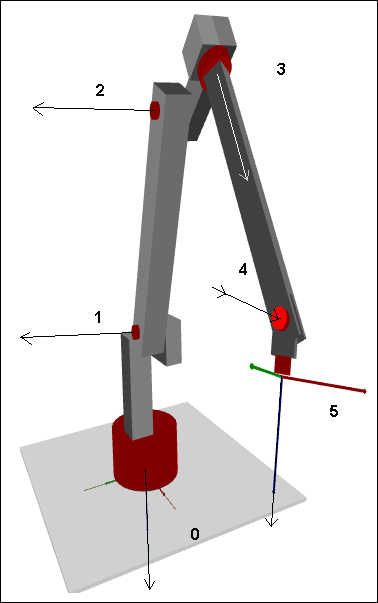
功能块 SMC_Trafo_ArticulatedRobot_6DOF 和 SMC_TrafoF_ArticulatedRobot_6DOF 实现六自由度机器人的正逆变换,位于 ⇘ 。因此,世界坐标的零点位于轴 0 的底部。Z 轴朝下,X 轴沿着工具中心点向前。世界坐标的零点位于轴 0 和机器人的底部焦点处。
轴的定义
在 ⇘ “参考位置可尺寸” 中,旋转方向是由黑色箭头表示。箭头沿轴线方向。旋转方式是按照右手定则进行的。例如,当轴 0 正向旋转时,从上往下看机器人顺时针方向旋转。
轴具有以下范围限制
- Axis 0, 1, 3, 和 4: ]-180°, 180°[
- Axis 2: [-90°, 180°]
- Axis 5: 没有限制,轴的范围可能大于 360°
参考位置可尺寸
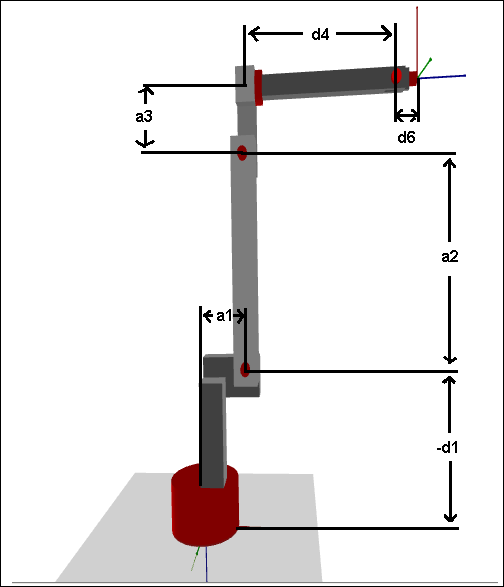
⇘ “编程” 显示运动学变换所需的基准位置,例如,所有轴在零位置的位置。所有显示的尺寸必须在结构体 SMC_TrafoConfig_ArticulatedRobot_6DOF 中进行配置。请注意 a_i 以及 d4 和 d6 为正向 d1 为反向。命名方式按照DH参数的形式进行。