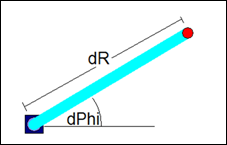
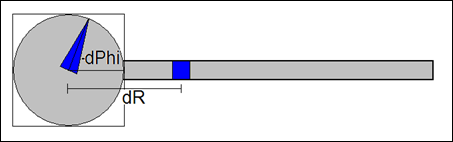
一个 Polar 系统包含一个距离和方向轴。
注意,轴的距离可以被修复 (在 X 轴的方向 dOffsetPhi = 0)。工件会按照轴线方向旋转 (沿反方向)。距离轴将会按照某种方式被引用,零点位于工件中心。否则需要定义 dOffsetR 。