运动学变换类似于 ⇘ “Gantry 系统”。然而,这个系统轴是静止的。系统通过传送带以及多向传送带带动 Y 轴运动。
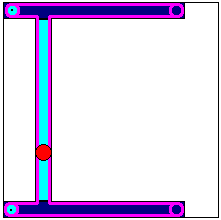
运动学变换通过以下模块实现
满足以下轴配置 (其他配置可以通过交换 x 和 y 的方式得到):
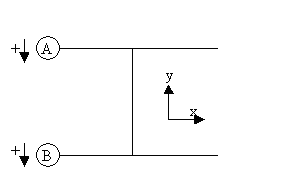
请注意,此变换模块需要一个特殊的回零方式:如果你希望在Y方向移动,驱动 A 和 B 必须按照相同的速度移动,而对于 X-方向的移动必须反向。当相关位置被找到的时候, X- 和 Y-值必须通过正向变换功能块作为一个偏移值使用 (dOffsetX and dOffsetY)。
运动学变换类似于 ⇘ “Gantry 系统”。然而,这个系统轴是静止的。系统通过传送带以及多向传送带带动 Y 轴运动。
运动学变换通过以下模块实现
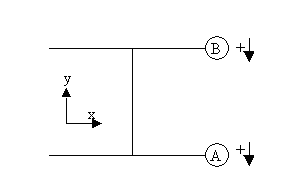
满足以下轴配置 (其他配置可以通过交换 x 和 y 的方式得到):
请注意,此变换模块需要一个特殊的回零方式:如果你希望在Y方向移动,驱动 A 和 B 必须按照相同的速度移动,而对于 X-方向的移动必须反向。当相关位置被找到的时候, X- 和 Y-值必须通过正向变换功能块作为一个偏移值使用 (dOffsetX and dOffsetY)。