SoftMotion
>
程序接口
>
SoftMotion 函数库
>
SM3_CNC.Library
>
SMC_CNC_POUs
>
SM_Trafo_POUs
>
SM_Trafo_POUs 概述
>
2-关节 SCARA 系统
2-关节 SCARA 系统
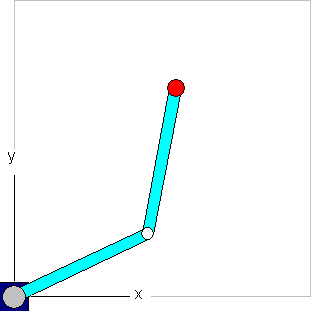
可选性柔性装配机器手 (SCARA) 是一种类似人的手臂的机器人系统。一个 SCARA 系统有两个轴以及两个自由度。然而,运动范围限制在 X-Y-平面内。
插图 167: 2-关节 SCARA 系统
⇘
“SMC_TRAFO_Scara2”
⇘
“SMC_TRAFOF_Scara2”