SoftMotion 中的cam 是嵌入到CODESYS 产品中的编程接口。 通过 “Cam”编辑器, cam凸轮表(或者开关)可以实现通过图形或者表格的形式进行编辑。当相关的应用程序生成代码时,一个全局数据结构(cam数据)会产生,产生的数据可以被 IEC 程序访问。因为此原因,函数库 SM3_Basic 将会在添加一个SoftMotion 设备后自动进行添加。

|
可以通过实例程序或者文档 ⇘ cam的简要介绍了解更多信息。 |
可以从以下链接查看更多:
一个凸轮表定义了一个主轴与从轴的函数关系。利用凸轮列表可以得到一个主轴与从轴的连续映射关系。更深入的说,经过主轴的图表形式的细分,每个映射的曲线图可以被表示为简单的直线或者复杂的五次曲。
示例
图表的水平方向表示主轴的值,凸轮表中的竖直轴表示从属轴的位置。
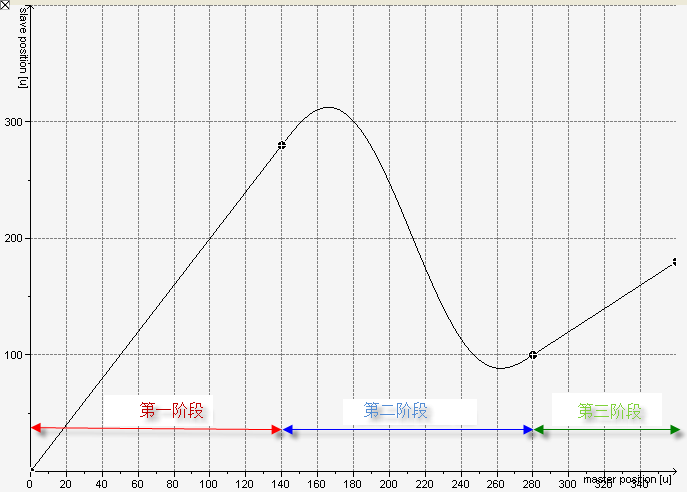
 插图 11: 电子凸轮表
插图 11: 电子凸轮表主轴的范围从0到360.这个范围被分为三部分:
- 左边的为第一部分: [0, 140]
- 中间的为第二部分: [140, 280]
- 右边的是第三部分: [280, 360]
在第一部分和第二部分显示的是一个线性关系因此呈现的是一条直线。他的一阶导数是一个常数,更高的导数为0。
第二个区间的映射曲线是一个五阶多项式。因此,他的一阶导数是一个四阶多项式,他的二阶导数是一个三阶多项式,三阶导数是一个两阶多项式(以此类推……)。
如果你能理解从轴的位置关系与主轴的位置是一个映射关系,那么他的一阶导数就是从轴的速度,他的二阶导数就是从轴的加速度。
如果要保持物理连接上的连续性,图示中的映射关系必须是连续的,这样图表中才不会有跳跃产生。尤其的,这必须包含所有点的信息, 尤其是两个交叉点。此外,对一阶导数和二阶导数也要求是要连续的。(事实上,这三个连续性的要求五阶函数从起始点到结束点都保持一个连续性。)
此外,如果凸轮表定义为周期性的转化,从轴一阶导数和二阶导数在结束点的位置映射必须和它在起始点的位置映射相吻合(在结束点的映射值也可以是起始点映射值的倍数关系)。
更多的,挺杆,也就是一个二进制开关,可以被添加到一个凸轮的任何位置。尤其是,可以产生一个只含有挺杆的电子凸轮表,通过将主轮的整个范围值设定为0实现。
一个 “电子凸轮表”是一个可以被添加到SoftMotion 中的一个设备。 因此,可以通过选择位于“设备”树中的工程应用中的 “添加电子凸轮表” 对话框,具体打开路径是通过上下文菜单选择或者通过 “工程” 菜单。
除此之外,如果希望以CODESYS 函数库的形式存储文件,例如 "<工程名>.library" 的形式,需要将电子凸轮表放到POU中。因此需要在“POUs”树中选择函数库的名称,并且利用 产生对话框。
在弹出的对话框中输入一个名字 ("Cam_1" 默认名字) 并通过“打开”进行确认。电子凸轮表就会插入到设备树当中(或者POU程序中)并且电子凸轮编辑器会以默认的参数形式打开一个新的凸轮表。
一个电子编辑器包含以下几部分:
- 一个以电子凸轮的名字定义的编辑器在设备树中有特定的位置(例如 "Cam_1 [PLCWinNT:Plc Logic:Application]")。这个窗口包含图形化的电子凸轮表编辑器以及表格形式的数据等4个选项卡。
⇘ “选项卡 'Cam'”
⇘ “'Cam 表'选项卡”
⇘ “‘挺杆’选项卡”
⇘ “‘挺杆表’选项卡”
- 一个 “工具条”提供了一些用于选择或者插入挺杆的工具,详细信息参考:
⇘
“电子凸轮编辑器的工具条”
- 默认的“属性” 窗口显示在工具条下方。在凸轮表编辑器中选择一个凸轮或者挺杆,就可以对其属性进行编辑和修改。更多信息请参阅: ⇘ “Cam 元素的属性”。
对于当前设备树中选择的电子凸轮的基本设定,可以通过一个电子凸轮对象的“属性”对话框进行。
通过上下文菜单打开“属性...”的条目或者通过“视图”窗口中的 “属性”命令打开属性条目。详细信息请参阅Properties....
“属性”命令打开属性条目。详细信息请参阅Properties....
在电子凸轮进行编译的过程中会产生 ⇘ “MC_CAM_REF”格式的结构体变量。他包含每个电子凸轮的映射,这种类型的数据结构被用作 ⇘ “MC_CamIn”的输入模块。这个结构体属于函数库 ⇘ “SM3_Basic”。