通过在“设备”树中的SoftMotion驱动器逻辑上双击或者选中设备逻辑并使用命令“在编辑器中打开”,对应设备配置的设备编辑器将会打开。
SoftMotion中驱动器逻辑是位于一个主轴或者编码器下的一个虚拟轴
逻辑驱动器作为一个特别的实例反应相关主轴的运动情况。可以处理以下数据结构而不影响主轴: ⇘ MC_SetPosition, ⇘ MC_TouchProbe (可以被逻辑轴使用,但是前提是通道没有被主轴或者主轴的其他逻辑轴使用) 以及 ⇘ MC_AbortTrigger。
轴类型 ⇘ AXIS_REF_LOGICAL_SM3是函数库 ⇘ SM3_Basic的一部分。这个类型的实例是通过SoftMotion逻辑驱动器编辑器实现的:
SoftMotion 驱动器编辑器的第一个表格中包含了配置的多个块。
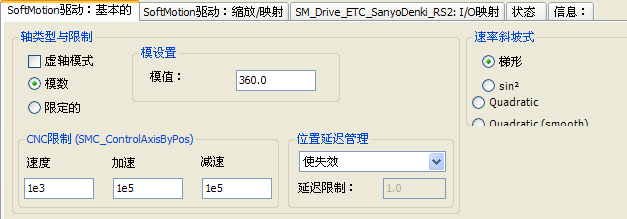
 插图 65: 'SoftMotion 设备:逻辑轴中的旋转类型
插图 65: 'SoftMotion 设备:逻辑轴中的旋转类型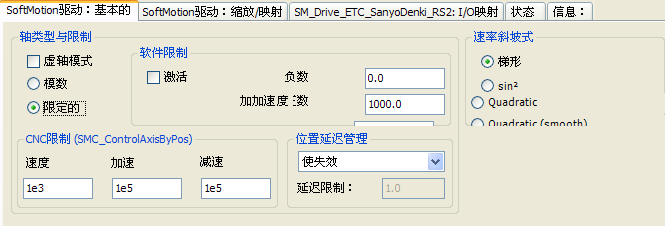 插图 66: 'SoftMotion 设备: 逻辑轴中的直线类型
插图 66: 'SoftMotion 设备: 逻辑轴中的直线类型“轴类型”
如果轴的类型被设置为“旋转”,那么“模数设置”可以用于设置“模数值”。
如果轴类型设置为“线性”,那么可以对轴设置正反向位置限制。
“主轴参考值”
通过这个单选框可以在主轴设置值和实际值参考之间进行选择。根据这个设置,主轴的设置值或者当前值会作为逻辑轴的输入并且作为补偿偏移的参考。
“时间偏移”
在这里定义循环的序号,通过主轴进行的推算,可以被设置。循环的序号定义时间间隔,设置值将会被推算。
“输入数据过滤”
过滤器评估平均值的移动。根据选择的周期数目评估值将会用于分别计算“位置”,“速度”。最终会创建一个平滑值,范围是从 0 到 9。如果循环数量被设置为 0,那么最新的数据将会被用作位置或者速度的过滤值。否则将会使用评估值。