4-轴搬运机器人是一个很普遍的系统,主要用于码垛任务。具有4 个控制轴 (红色 ⇘ ) 以及第五个机械旋转轴 (灰色 ⇘ “轴的定义”)。第五个机械轴用于保持夹具水平对准。功能块 SMC_Trafo_4AxisPalletizer 和 SMC_TrafoF_4AxisPalletize 实现正逆运动学变换。
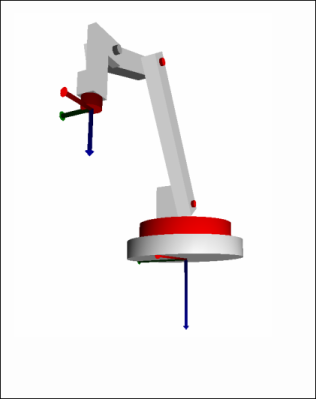
 插图 174: 运动学概述:控制轴为红色,机械轴为灰色
插图 174: 运动学概述:控制轴为红色,机械轴为灰色显示在 ⇘ “轴的定义”坐标系统是世界坐标系统。z-轴矢量方向向下,X轴向前,例如,此方向是机械臂位于零位置时的指向。( ⇘ “零点位置和尺寸”) 该坐标系统的原点是轴1关节的交叉点以及机器人的底册。
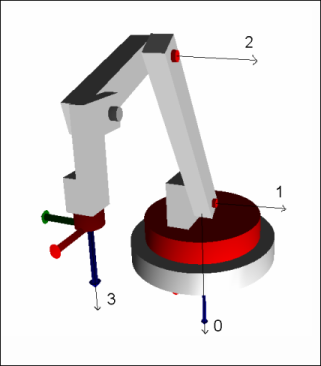
⇘ “ G-代码编程” 显示4轴的旋转方向。黑色箭头沿着轴的旋转方向。旋转方向按照右手规则进行定义:如果右手弯曲手指沿着轴的旋转方向,那么拇指的方向就是轴的方向。例如,从上往下看轴 0 为顺时针方向,轴 1 和轴 2 向前倾斜。
轴具有以下最大范围:
- Axis 0: ]-180°, 180°[
- Axis 1: [-90°, 90°]
- Axis 2: [-180°, 90[
- Axis 3: 没有限制,范围值可能大于 360°
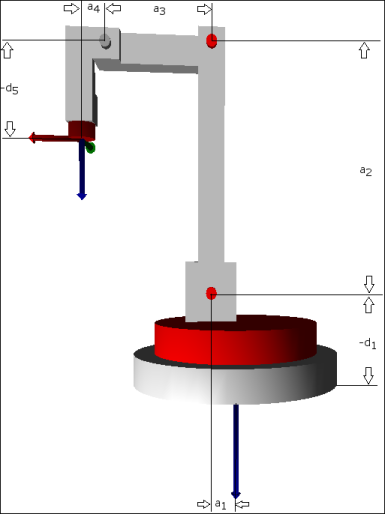
⇘ “对象”显示所有轴的零点运动学位置。在零点位置,工具中心点的坐标是根据世界坐标系来进行定义的。绘制的尺寸必须限制在配置结构体 SMC_TrafoConfig_4AxisPalletizer 中。所有 a_i 必须输入正值并且 d_i 带有负号。参数的名称根据DH参数命名。
数据结构 SMC_TrafoConfig_4AxisPalletizer 和功能块 SMC_Trafo_4AxisPalletizer 和 SMC_TrafoF_4AxisPalletizer 包含在 SM3_CNC。可以通过浏览函数库管理中的参数描述获取简单的帮助。 ⇘