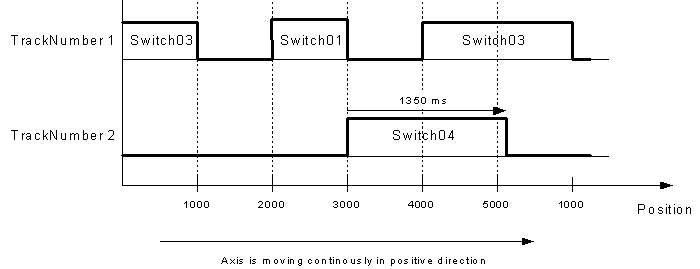
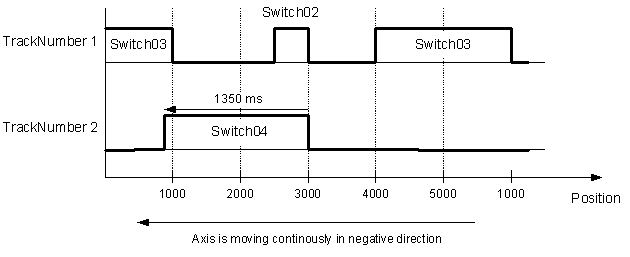
这个功能块位于函数库 ⇘ SM3_Basic.library。类似于选择一个驱动器曲柄机构:功能块的命令左右于一组离散的输出位用于设置连接到一个轴的机械凸轮开关输出。允许进行正向和反向操作。
|
类型 |
初始值 |
描述 |
|
|---|---|---|---|
|
VAR_IN_OUT |
|||
|
Axis |
AXIS_REF |
|
对应开关连接的轴,参阅 ⇘ AXIS_REF_SM3 |
|
Switches |
MC_CAMSWITCH_REF |
|
对应开关动作,参阅 ⇘ HMC_CAMswitch |
|
Outputs |
MC_OUTPUT_REF |
|
参考信号输出,直接关联到相应的轨迹,参阅 ⇘ MC_OUTPUT_REF |
|
TrackOptions |
MC_TRACK_REF |
|
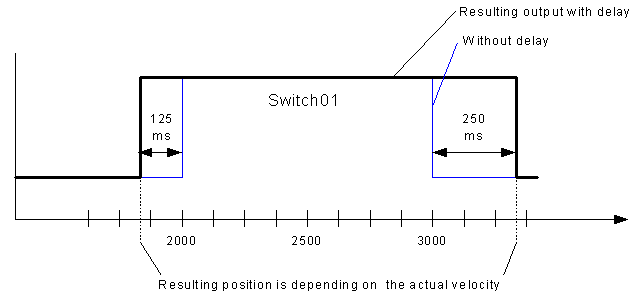
参考结构,包含轨迹的相关属性,例如 ON 和 OFF 补偿每路的输出/轨迹,参阅 ⇘ MC_TRACK_REF |
|
VAR_INPUT |
|||
|
Enable |
BOOL |
FALSE |
必须设置为 TRUE 才能启动功能块的处理 |
|
EnableMask |
DWORD |
16#FFFFFFFF |
32 位的 BOOL 变量激活不同的轨迹。至少有显著数据关联到最低的 TrackNumber。 |
|
TappetMode |
MC_TAPPETMODE |
tp_mode_auto |
位置输出模式,参阅 ⇘ MC_TAPPETMODE |
|
VAR_OUTPUT |
|||
|
InOperation |
BOOL |
FALSE |
TRUE,如果命令轨迹被激活 |
|
Busy |
BOOL |
FALSE |
TRUE,如果功能块的处理没有完成 |
|
Error |
BOOL |
FALSE |
功能块内部发生错误信号 |
|
ErrorID |
SMC_ERROR |
0 |
错误ID,参阅 ⇘ SMC_Error |

|
这些功能机经常被叫做 PLS – 相位或者程序限位开关。 |