为了定义附加样条轴的目标位置,G-代码字 A, B 和 C 被使用。他们依赖于对象相对位置的多项式函数。相比较而言,附加轴 P, Q. U, V, W 依赖于线性函数。

|
使用 A, B 或者 C 而不是附加轴 U, V 和 W ,因为 U, V 或者 W 定义了梯度值。 |
示例
G-代码
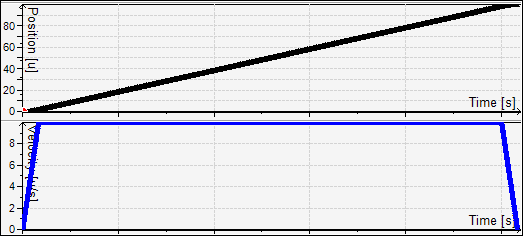
N10 G0 X0 A0 P0 F10 E30 E-30 N20 G1 X100 A100 P100
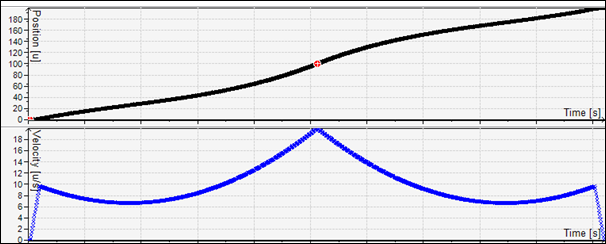
附加线性轴 P 是按照线性插补到正确位置。因此,路径速度的梯度曲线为:
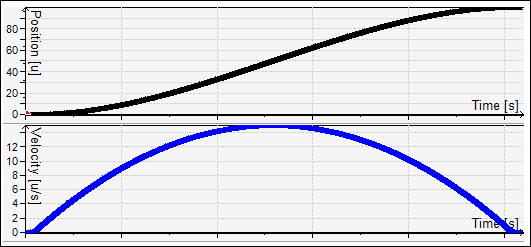
附加轴 A 是按照一个多项式函数进行插补。
示例
使用样条曲线插补在具有连续正选转化时非常有用,在这种情况下的插补不用减速为 0 。
G-代码
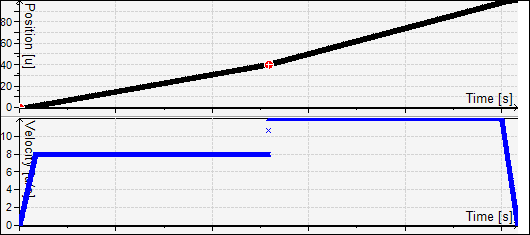
N10 G0 X0 A0 P0 F10 E30 E-30 N20 G1 X50 A40 P40 N30 G1 X100 A100 P100
在线性插补中因为此因素会有一个跳跃,在第一部分从 40 单元跳转到 50 单元处。 在第二部分附加轴的 60 单元处跳转到 50 单元。因为路径的速度值仅在笛卡尔坐标中的 (XYZ) 处定义,X 的恒定速度导致 P的跳跃:
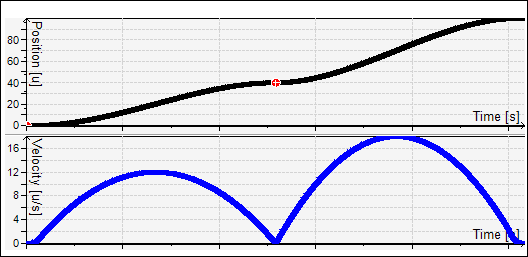
样条轴显示如下轮廓:
示例
对于对象切换时速度降为 0,图表的结束或者起始位置自动定义。在这种情况下轴的动作类似于线性轴。对于速度 > 0的跳变,用户可以定义渐变过程(单位:空间中每个附加轴的路径单位) 使用 G-代码中的关键字 U 作用 A,V 作用 B 以及W 作用 C。
G-代码
N10 G0 X0 A0 F10 E30 E-30 N20 G1 X100 A100 U2 N30 G1 X200 A200
因为这段代码在 N20 到 N30包含一个静态转化,A 轴 (U=2)的编程梯度受到影响。在 X = 100 轴 A 增长是路径长度的两倍。
A, B 或者 C 的使用不同于附加轴 U, V 和 W, 因为 U, V 或者 W 是按照梯度定义。
功能块 ⇘ “SMC_SmoothPath” 自动定义附加轴的梯度,所以定义 U, V 和 W 是没有必要的。
轴 A, B 和 C 可以在功能块 ⇘ “SMC_LimitDynamics”和 ⇘ “SMC_CheckForLimits”的输入wAxis以及wAddAxis的位 3, 4 或者 5 之间选择。
数据结构 SMC_ ADDAXIS 是元素 ADDAXIS_A, ADDAXIS_B, 和 ADDAXIS_C 的扩展。