|
Xenomai API
2.5.6.1
|
|
Xenomai API
2.5.6.1
|
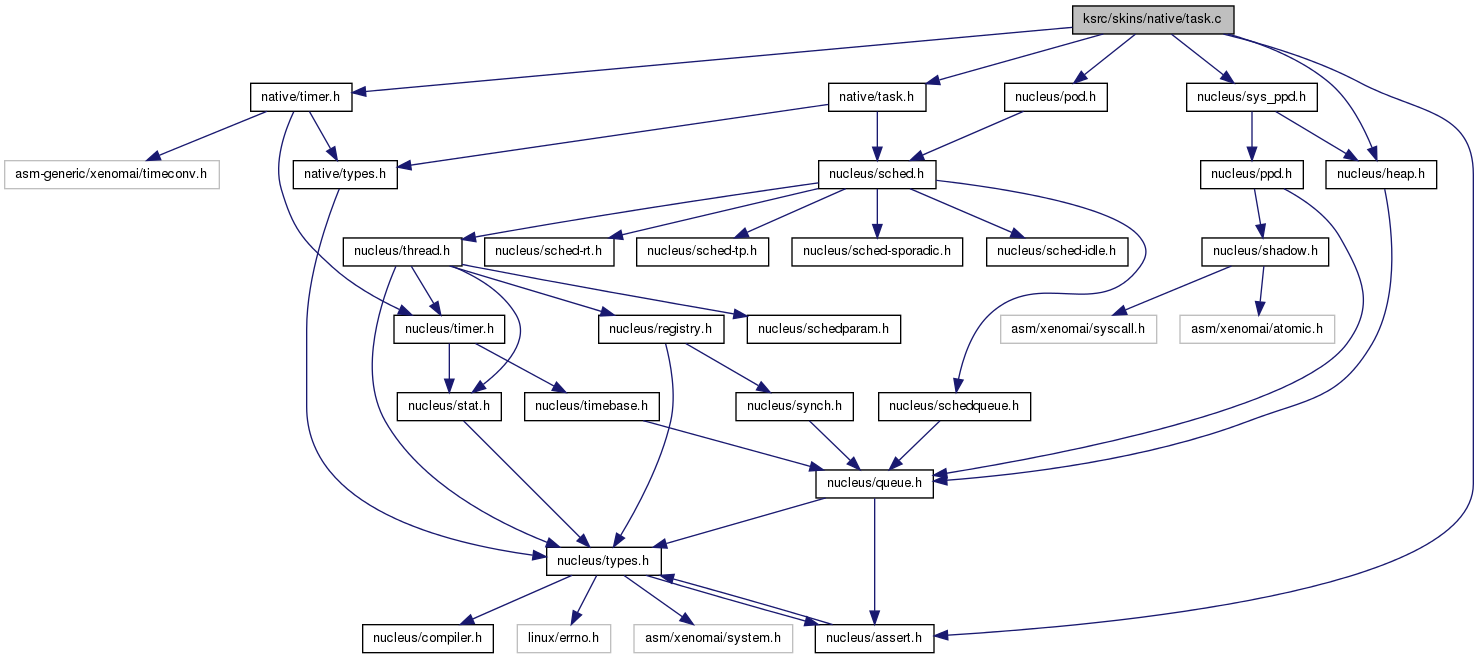
This file is part of the Xenomai project. More...
Functions | |
| int | rt_task_create (RT_TASK *task, const char *name, int stksize, int prio, int mode) |
| Create a new real-time task. | |
| int | rt_task_start (RT_TASK *task, void(*entry)(void *cookie), void *cookie) |
| Start a real-time task. | |
| int | rt_task_suspend (RT_TASK *task) |
| Suspend a real-time task. | |
| int | rt_task_resume (RT_TASK *task) |
| Resume a real-time task. | |
| int | rt_task_delete (RT_TASK *task) |
| Delete a real-time task. | |
| int | rt_task_yield (void) |
| Manual round-robin. | |
| int | rt_task_set_periodic (RT_TASK *task, RTIME idate, RTIME period) |
| Make a real-time task periodic. | |
| int | rt_task_wait_period (unsigned long *overruns_r) |
| Wait for the next periodic release point. | |
| int | rt_task_set_priority (RT_TASK *task, int prio) |
| Change the base priority of a real-time task. | |
| int | rt_task_sleep (RTIME delay) |
| Delay the calling task (relative). | |
| int | rt_task_sleep_until (RTIME date) |
| Delay the calling task (absolute). | |
| int | rt_task_unblock (RT_TASK *task) |
| Unblock a real-time task. | |
| int | rt_task_inquire (RT_TASK *task, RT_TASK_INFO *info) |
| Inquire about a real-time task. | |
| int | rt_task_add_hook (int type, void(*routine)(void *cookie)) |
| Install a task hook. | |
| int | rt_task_remove_hook (int type, void(*routine)(void *cookie)) |
| Remove a task hook. | |
| int | rt_task_catch (void(*handler)(rt_sigset_t)) |
| Install a signal handler. | |
| int | rt_task_notify (RT_TASK *task, rt_sigset_t signals) |
| Send signals to a task. | |
| int | rt_task_set_mode (int clrmask, int setmask, int *mode_r) |
| Change task mode bits. | |
| RT_TASK * | rt_task_self (void) |
| Retrieve the current task. | |
| int | rt_task_slice (RT_TASK *task, RTIME quantum) |
| Set a task's round-robin quantum. | |
| ssize_t | rt_task_send (RT_TASK *task, RT_TASK_MCB *mcb_s, RT_TASK_MCB *mcb_r, RTIME timeout) |
| Send a message to a task. | |
| int | rt_task_receive (RT_TASK_MCB *mcb_r, RTIME timeout) |
| Receive a message from a task. | |
| int | rt_task_reply (int flowid, RT_TASK_MCB *mcb_s) |
| Reply to a task. | |
This file is part of the Xenomai project.
This program is free software; you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation; either version 2 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program; if not, write to the Free Software Foundation, Inc., 59 Temple Place - Suite 330, Boston, MA 02111-1307, USA.
 1.7.6.1
1.7.6.1 
