像 ⇘ 的单轴运动可以被任何其他的运动中断。例如,一个到不同位置的运动或者改变速度或者加速度值。基本上,一个功能块被另一个功能块中断时是按照某种方式进行的,确保速度(“梯形”速度曲线),加速度(“sin²”曲线)没有跳跃。所以停止方式受曲线类型限制。
如果这个中断发生在减速度停止阶段,那么在一些曲线类型,例如“sin²” 或者 “二次 (圆滑)”曲线类型,在这种情况下,即使有中断也会达到目标位置,即使当前位置是目标位置或者位于中断运动目标位置之后(运动方向)。作为结果,轴将反转并且达到新的位置。这在曲线类型“sin²” ( ⇘ “在减速暂停运动过程中中断单轴运动”) 中有详细说明并且类似于曲线类型“二次曲线 (圆滑)”。
在这种情况下,可能的目标位置被处理,尽管新的位置不是位于旧的目标位之前?
这种情况可能发生在当设置减速度的最大值 (或者在曲线类型“二次曲线” 或者 “二次曲线 (圆滑)”的加加速度值) 。在这种情况下,减速距离可能太小。
但是如果最大值相同或者设置为一个比较大的值,将会使用以下值:
- 对曲线类型“梯形” 以及 “二次曲线”,将不会进行任何处理。
- 对曲线类型“sin²”,如果加减速度的目标位置以及限制值与之前的值相同,那么将会保证处理绝对不会进行。
- 在其他情况,一个处理可以发生在曲线类型“sin²” 和 “二次曲线 (圆滑)”上。
在单轴启动运动时,运动曲线首先进行计算,这意味着其中的相位按照一个常量速度或者减速度被加速,。在曲线类型“sin²”,线性加减速度被 sin² 曲线代替。sin²曲线具有这样的特征,起点和终点的加速度为 0 ,所以在下一个相位具有连续的转化。
如果在 sin² 曲线运动被中断的时候会有一个特殊的动作。如果当前的减速度不为 0 ,那么一个 sin² 曲线将不会被启动,因为其要求在启动的时候加速度为 0 。
sin² 轮廓曲线保证具有一个连续的加速度,斜坡的加速度首先降为0 。为此这个曲线使用加加速度输入并且,如果加加速度为0,加加速度值(fRampJerk)将会在驱动器配置中设置。
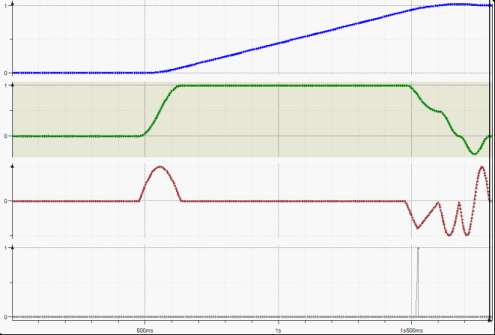
以下表格显示中断动作:底部图表显示功能块中断信号的处理。那么在下一个起始相位中,从黑线处开始,在一个新的 sin2 曲线连接之前,减速度将会减少为线性曲线。
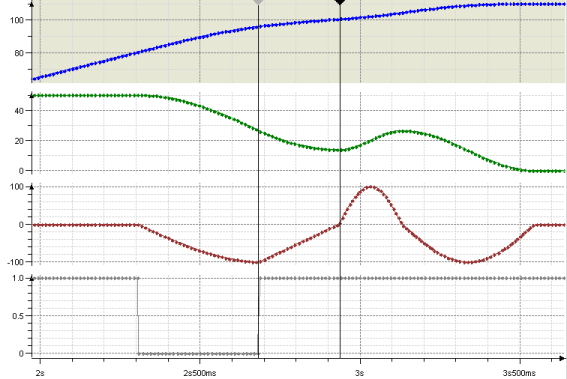

|
如果相对于加速度的加加速度设置的太小,那么相位将会非常长,并且功能块开起来像失控状态。你应该选择加加速度的方式,曲线的下降只会持续非常短的时间。例如,加速度 = 10.000 u/s2,加加速度 = 1.000.000 u/s3。因此,相位至少会持续 10ms。 |
基本上,如果要避免这种附加相位下降。如果一个运动被另一个运动中断,那么将会进行计算,判断加速度和减速度的相位是否相同。如果相同,那么sin² 曲线将不会被中断并且不会发生改变。如果不相同,曲线将会被中断。因此,在其他情况下处理目标位置可能会有以下情况。