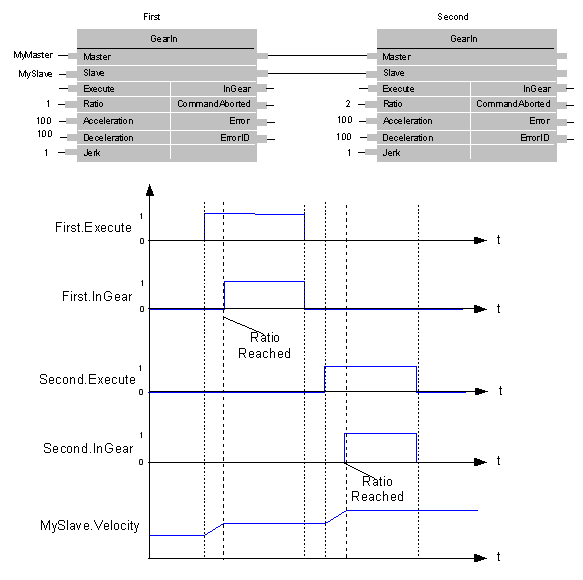
这个功能块位于 ⇘ “SM3_Basic”。他定义一个从轴到主轴并且在主轴和从轴速度之间应用一个特定的速度比。
|
类型 |
初始值 |
描述 |
|
|---|---|---|---|
|
VAR_IN_OUT |
|||
|
Master |
AXIS_REF |
映射到主轴,参阅 ⇘ “AXIS_REF_SM3” |
|
|
Slave |
AXIS_REF |
映射到从轴,参阅 ⇘ “AXIS_REF_SM3” |
|
|
VAR_INPUT |
|||
|
Execute |
BOOL |
FALSE |
此输入 的一个上升沿将启动功能块的处理 |
|
RatioNumerator |
INT |
1 |
齿轮比分子 |
|
RatioDenominator |
UINT |
1 |
齿轮比分母 |
|
Acceleration |
LREAL |
0 |
电子齿轮比加速度 |
|
Deceleration |
LREAL |
0 |
电子齿轮比减速度 |
|
VAR_OUTPUT |
|||
|
InGear |
BOOL |
FALSE |
TRUE 如果齿轮比的处理已经完成 |
|
Busy |
BOOL |
FALSE |
TRUE 如果功能块的处理没有完成 |
|
CommandAborted |
BOOL |
FALSE |
TRUE 如果命令被另一个命令中断 |
|
Error |
BOOL |
FALSE |
功能块内部发生错误信号 |
|
ErrorID |
SMC_ERROR |
0 |
错误ID,参阅 ⇘ “SMC_ERROR” |