通过双击设备树中的SoftMotion设备或者选择“设备”的邮件菜单,选择“编辑对象”。
根据不同设备的设备类型在SoftMotion设备编辑器中可能包含用于配置的不同表格。可以通过以下描述详细了解SoftMotion编辑器的每个部分:
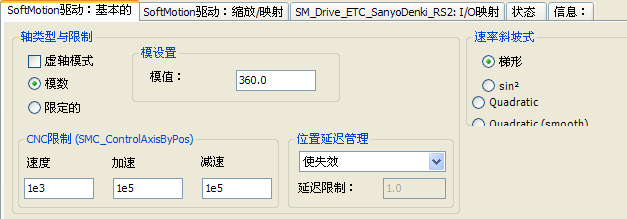
 插图 63: SoftMotion设备:基本
插图 63: SoftMotion设备:基本“轴类型和限制”
“虚拟模式”:如果激活这个选项,设备将会被类似一个虚拟轴的设备取代。在虚拟轴中这个选项必须被激活。与实际连接的设备不同此设备即使在没有连接现场总线的基础上也能运行,但是没有从实际轴上接受或者发送的数据产生。

|
一个轴的虚拟模式可以在IEC代码中可以被设置/复位通过 ⇘ “SMC3_ReinitDrive”。 |
选择一个轴类型。注意有不同的选择:
-
“模态”
- “模态设置”:通过输入模数值定义模式范围。强制用于模态轴。保存在 AXIS_REF_SM3 结构体中的fPositionPeriod参数内,位于选项表“配置”页面下。
-
“直线”
- “软限位”:如果你希望位置值有一个软限位,激活这个选项。通过“反向”以及“正向”设定正反向位置限定值。“减速度”用于定义参数fSWLimitDeceleration 用于在软限位到达之后定义运动的减速度。
|
|
如果选择“模态”那么要保证fPositionPeriod * dwRatioTechUnitsDenom必须是一个整数值。 对于两种类型都有效:
|
“ CNC限制 (SMC_ControlAxisBy*)”
定义限制值
- “速度 [u/s]”
- “加速度 [u/s²]”
- “减速度 [u/s²]”
此限制用于函数库模块 SMC_ControlAxisBy* 用于限制跳转,例如 ⇘
“位置滞后监督”
定义系统的检测滞后误差后的反应。当额定位置和补偿的实际位置之间的差值超过滞后限制就会产生滞后误差。实际位置的计算公式:
Extrapolated actual position := actual position + actual velocity * cycle time * Axis.fSetActTimeLagCycles
这个值等于轴的结构体中的fSetActTimeLagCycles 周期( ⇘ “功能块 AXIS_REF_SM3”) 补偿用于因为通讯而导致设置值与当前值之间的偏差。
检测到滞后误差可能出现的反应是:
- “停用”:没有任何反应,因为滞后监督被取消。
- “禁用驱动器”:位bRegulatorOn被强制为 FALSE (与 MC_Power 输入比较),这导致驱动器被禁用 (当然依据驱动器减速度实现方式) 。
- “执行快速停止”:位bDriveStart被强制为 FALSE (与 MC_Power 输入比较),这导致驱动器快速停止。
- “停留当前状态”:驱动器任然位于当前状态,但是停止所有运动。
“滞后限制”:定义滞后限制。
|
|
这个设置是关于在控制器位置滞后监督。有可能是驱动器本身的额外的独立监督,不能在此对话框中进行配置。 |
“速度曲线类型”
速度梯度类型定义速度曲线用于单轴以及主/从模式下的多轴运动。包含的函数库提供以下三种不同的速度选择模式:
- “梯形”:创建一个梯形速度曲线 (在每个部分是个常量加速度)
- “Sin²”:创建一个 sin²-速度曲线 (具有连续加速度)
- “二次”:创建一个具有加加速度限制的梯形加速曲线
- “二次 (圆滑)”:像模式“二次”但是创建没有跳转的加加速度曲线。
|
|
linktarget [smInterruptionOfSingleAxisMovements] doesn't exist but @y.link.required='true' |
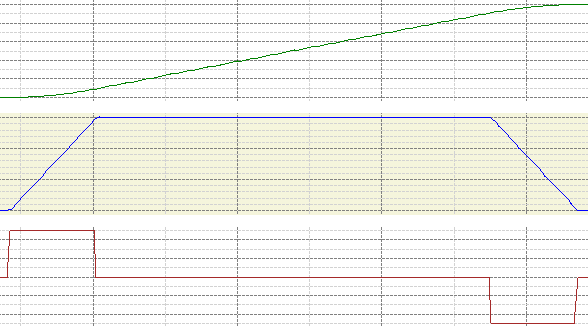
示例
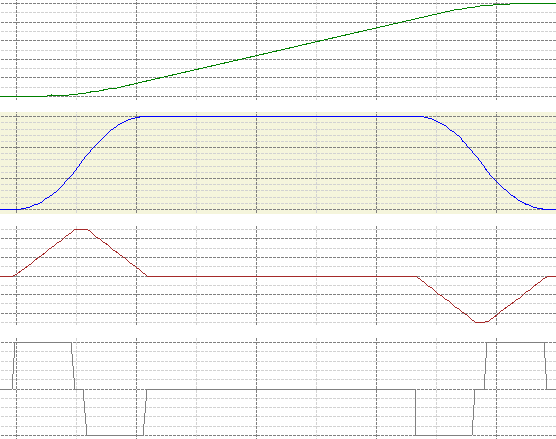
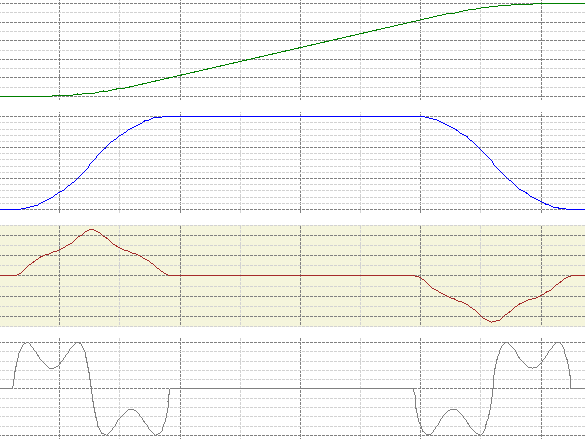
以下图片展示了不同曲线类型的不同;位置显示为绿色,速度为红色加速度为蓝色。
|
“梯形” 速度曲线是分段的,但是是连续的,但是加速度呈现分段跳跃。 |
|
|
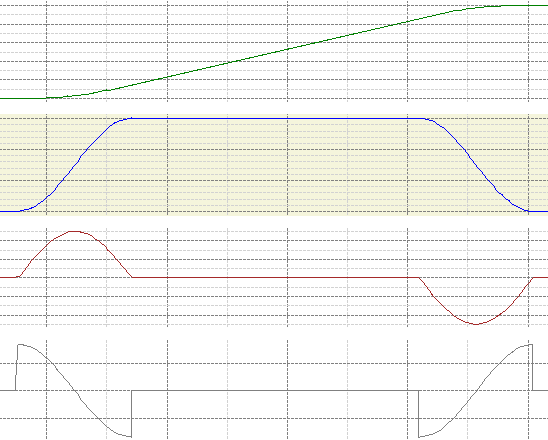
“Sin²” 速度曲线的形状是圆滑的(通过使用 sin²-功能替代线性功能),这样在加速度曲线中的跳跃将会被避免。 运动队列被清楚的定义,通常情况下用户不能限制加加速度。加加速度的限制只有在加速度起始为0 的情况下才能被限制。然后因为加加速度的限定,在实际运动发生前,驱动器将运行到0位。与梯形速度曲线比较,减速过程将需要更长的时间。更多详细信息参阅 linktarget [smInterruptionOfSingleAxisMovements] doesn't exist but @y.link.required='true' . |
|
|
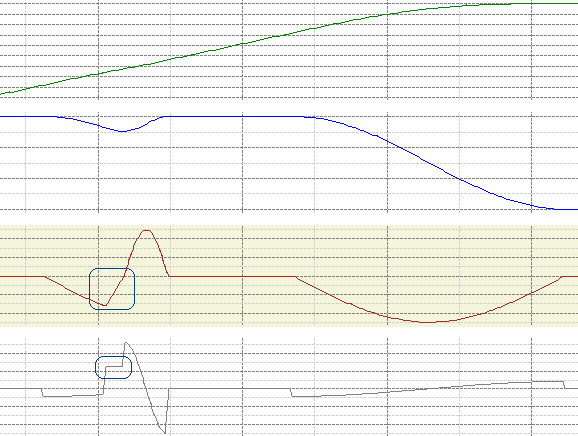
“二次曲线” 加速度部分线性并且是连续的,加加速度显示有跳跃。速度曲线由二次曲线和直线部分组成。 |
|
|
“二次方圆滑” 二次曲线中的线性加速度被起点和终点为0 的圆滑函数所代替,从而使跳跃也连续。 注意:如果一个运动过程被中断那么会造成加加速度的跳跃。 |
|
物理设备到应用程序中设备的转化
“比例”
此处显示的比例编辑器定义在设备描述文件中。如果参数 bHiresMode 为 TRUE,那么将会显示一个简单的 编辑器,否则显示一个详细编辑器。
根据设备,有以下设置:
- 简单
“精确 (十进制数字)”:在此输入一个十进制数,实例的用户单位将会根据这个进行变化。例如,输入3 表示 103。 - 详细
在这里输入从驱动器获取的实际位置值到IEC应用中进行转化的多个因素的值。- “反转方向”:勾选这个选项用于反转。电机将会获取给定值的一个负值,并且将会反向运动。
- “增量 <=> 电机转数”:编码器增量值对应电机的转速。保存在AXIS_REF_SM3 的参数wRatioTechUnitsDenom中。更多的参阅设备编辑器中的选项“配置”。
- “电机转数 <=> 比例输出转数”:根据给定的输入值和比例输出值进行电机转数转化。
- “比例输出 <=> 应用中单位”:根据比例值将输出转数转化为应用中的单位值。
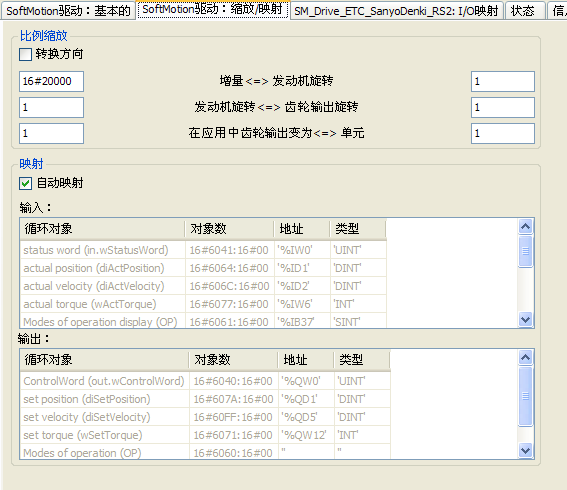
 插图 64: SoftMotion 编辑器 - SoftMotion 设备:比例/映射
插图 64: SoftMotion 编辑器 - SoftMotion 设备:比例/映射“缩放”
你必须定义从设备实际读取到的整数位置(第一行左边对象)与IEC程序中使用的单位(第三行右边对象)的一个比例关系。此外,通过进一步的参数编辑,一个驱动器可以被更好的进行管理。
在示范的配置中,驱动器一圈 3600 增长被换算成程序中以度数定义的计数单位。
“映射”
通过使用“自动映射” 连接设备的 IEC 参数将会自动映射到相应设备的输入-/和输出接口上。在不激活此复选框的时候可以对显示参数列表中的输入或者输出地址或者类型进行手动修改,所有这些参数都是通过设备描述文件中读取的。