这个数据结构位于CODESYS SoftMotion 函数库SM3_CNC 。其中的值定义了速度预处理可能的状态:
|
枚举成员 |
允许的值 |
描述 |
|---|---|---|
|
TRAPEZOID |
0 |
梯形速度结构。 |
|
SIGMOID |
1 |
s型速度结构并且有一个加加速度常量。 |
|
SIGMOID_LIMITED |
2 |
速度曲线类型与外部模式SIGMOID类似,不同的是,以梯形或者s曲线插补一个路径需要相同的时间。由于这个原因,存在的模式SIGMOID 超过限制 PI/2的限制因素。 |
|
QUADRATIC |
3 |
具有加加速度限制的以梯形曲线规划的加速度曲线:这个模式,将会保持加加速度在一个限制范围内 (以 dJerkMax 定义),是速度平方的形状。该位置曲线是建立在三次多项式的基础上。因此,速度曲线包含抛物线,以及线段的加速度和水平线段。 |
|
QUADRATIC_SMOOTH |
4 |
此模式类似于QUADRATIC 但是能够保证加加速度没有跳跃。这是通过在开始和结束位置使用单调函数替换加速度的直线斜坡实现的。函数必须在加速度端导向相同的结束速度和位置。 类似于 sin² 函数用于在S曲线模式下代替一个线性速度。实际上,本段的计算和持续时间是不受影响的。 |
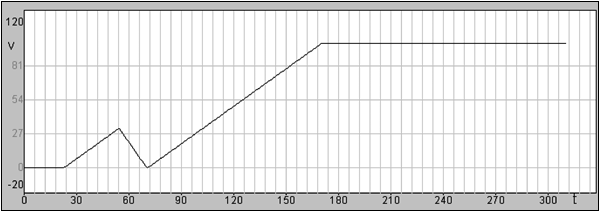
以下的两个示例中最大的加速度 (Accel) 比最大是加速度 (Decel)值要小。这种情况导致在加速和减速过程中不同的速度倾斜度。
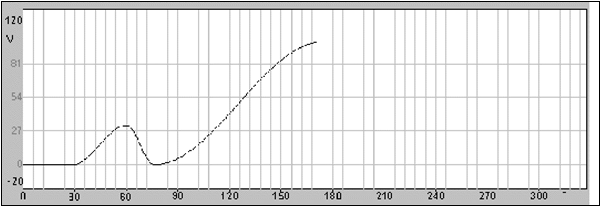
s曲线的速度平均值为,相关联的加速度 – 与梯形曲线不同 – 是连续的并且有机械上的缓解。这个平均值会被当前时间上的一个微小值进行补偿。
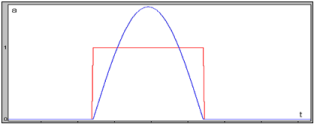
在s速度曲线中(蓝色)是这样设计的,但是梯形曲线(红色)并不会导致在完成一个路径上的时间的改变,在起始位置和结束位置的加速度和减速度必须比中间位置的值要大。因此,最大加速度和减速度的值存储在 ⇘ SMC_GEOINFO对象中并且可以被大部分的因素 π/2处理:
像 ⇘ dOverride描述的那样,不允许在线改变,直到当前运动的加速或者减速过程完成。
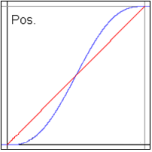
为了对附加轴也能使用s型曲线(下图中蓝色曲线)以代替直线(红色),当前对象中的变量piStartPos中的wSProfile参数必须被置位。这将会导致附加轴不是不是按照直线方式进行插补在 X-, Y-, Z-方向,而是根据路径以多项式的方式进行插补,这样就会导致在S型曲线中,起始位置和结束位置的轴位置速度和加速度都为零。