处理 MC_Stop 将会使控制器停止并且将轴的状态设置为stopping状态。因此,继续处理的功能块将会被终止。当轴的状态为stopping时,其他功能块将不会被允许对轴进行任何操作。
当轴达到速度零,输出Done将会被立即设置为 TRUE 并且轴继续在状态stopping 只要输入Execute 一直为 TRUE。如果Execute 为 FALSE 并且 Done 为 TRUE,那么轴将会到达 standstill状态。

|
在之前的CODESYS V3.5 SP4 版本中,轴将会在速度达到零并且输出Done为TRUE时,将其状态从stopping 转化为 standstill。 |
|
类型 |
初始值 |
描述 |
|
|---|---|---|---|
|
VAR_IN_OUT |
|||
|
Axis |
AXIS_REF |
|
映射到轴,参考 ⇘ AXIS_REF_SM3 |
|
VAR_INPUT |
|||
|
Execute |
BOOL |
FALSE |
如果 Execute 为 TRUE,功能块的处理将会启动并且将轴的状态转化为 stopping |
|
Deceleration |
LREAL |
0 |
加速度的值 [u/s2] |
|
VAR_OUTPUT |
|||
|
Done |
BOOL |
FALSE |
TRUE,当轴达到速度零 |
|
Busy |
BOOL |
FALSE |
TRUE,如果功能块的处理没有无完成 |
|
Error |
BOOL |
FALSE |
功能块内部发生错误信号 |
|
ErrorID |
SMC_ERROR |
0 |
错误ID,参阅 ⇘ SMC_Error |
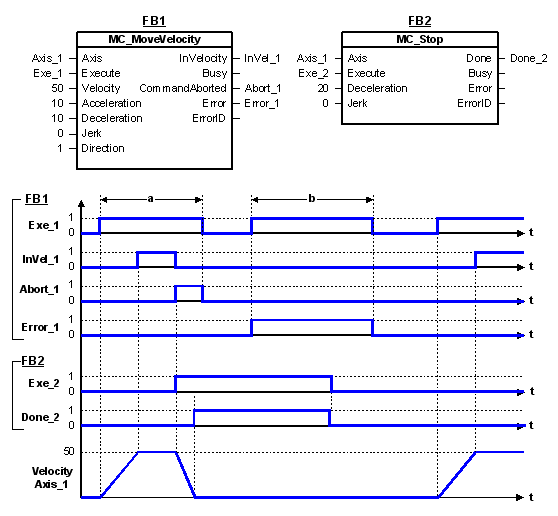
示例:
以下示例显示了在 ⇘ MC_MoveVelocity之后进行处理的功能块 MC_STOP :
MC_Stop功能块作用于一个旋转轴。
只要 MC_Stop 参数 “Execute” = TRUE功能块将会终止一切轴的运动,功能块 MC_MoveVelocity 将会返回一个被 MC_Stop 命令终止的信号。