这个功能块用于通过设置连接的相关表格选择 CAM 表格。
|
类型 |
初始值 |
描述 |
|
|---|---|---|---|
|
VAR_IN_OUT |
|||
|
Master |
AXIS_REF |
|
映射到主轴,参阅 ⇘ “AXIS_REF_SM3” |
|
Slave |
AXIS_REF |
|
映射到从轴 |
|
VAR_INPUT |
|||
|
Execute |
BOOL |
FALSE |
此输入的上升沿将会导致功能块的处理 |
|
RatioNumerator |
INT |
1 |
电子齿轮比分子 |
|
RatioDenominator |
INT |
1 |
电子齿轮比分母 |
|
MasterSyncPosition |
REAL |
0 |
轴以周期运动的主轴位置 |
|
SlaveSyncPosition |
REAL |
0 |
轴以周期运动的从轴位置 |
|
MasterStartDistance |
REAL |
0 |
在处理过程中的主轴的电子齿轮比 (轴位置从何处起始用于获取同步信息)。换句话说,在这个距离上从轴进入同步,例如从 "MasterSyncPosition - MasterStartDistance" 直到 MasterStartDistance。 如果 MasterStartDistance 为 0 (或者负数),那么从轴运动立即启动。 |
|
AvoidReversal |
|
||
|
VAR_OUTPUT |
|||
|
StartSync |
BOOL |
|
TRUE,如果电子齿轮开始进行处理 |
|
InSync |
BOOL |
|
TRUE,如果电子齿轮命令完成 |
|
Busy |
BOOL |
|
TRUE,如果功能块的处理没有完成 |
|
CommandAborted |
BOOL |
FALSE |
TRUE,如果命令被另一个命令中断 |
|
Error |
BOOL |
FALSE |
功能块内部发生错误信号 |
|
ErrorID |
SMC_ERROR |
0 |
错误ID,参阅 ⇘ SMC_Error |

|
在某些情况下,可能避免从轴反转是不可能的。(即使从轴速度不是主轴反向。) 一个示例是具有一个很小正向速度但是具有很大反向加速度的从轴。在这种情况下不能迅速的进行减速从而避免反向运动。 |
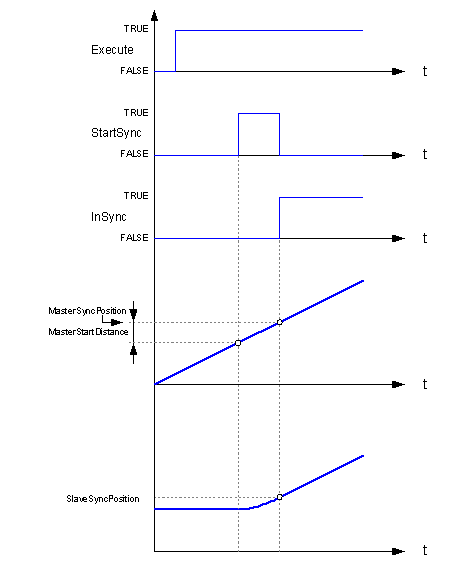
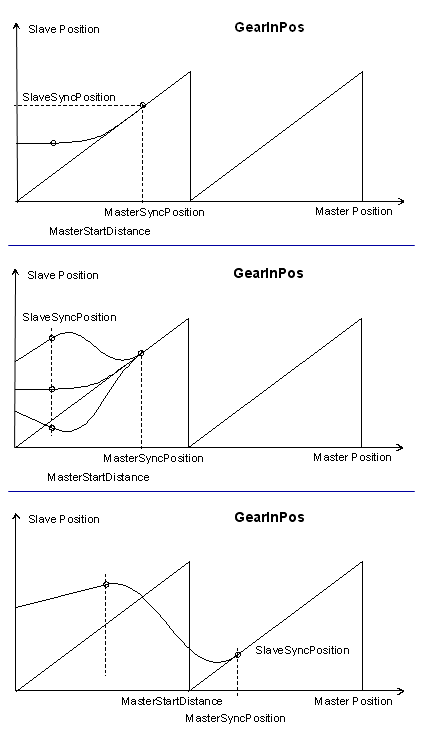
 插图 113: 不同齿轮比示例
插图 113: 不同齿轮比示例